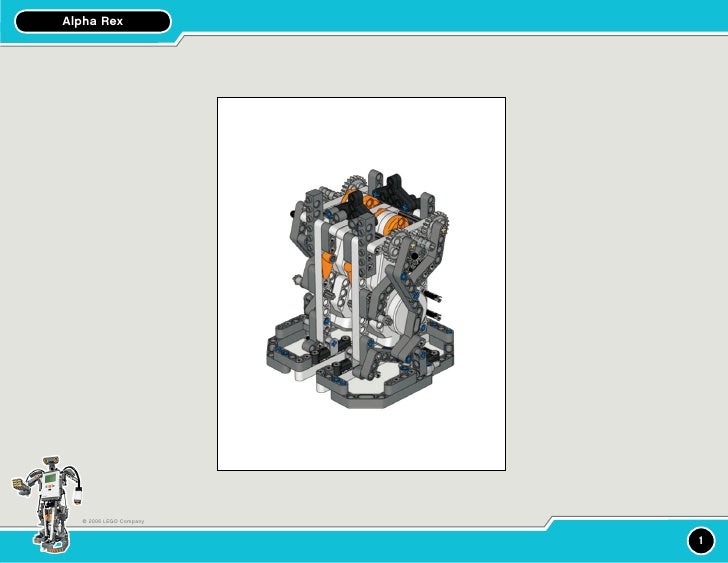
Mindstorms nxt alpha rex building instructions
Sound sensor, light sensor, motor , and of how to program those robots to do tasks. The retail software comes with a step-by-step tutorial of how to build, and program premade robots, that often have several different components, rather than teaching the user how to apply each component. Several other key differences: Retail version comes with more parts, but uses AA batteries.
Educational version comes with less parts, but has a removable, rechargeable battery pack. Thus the educational version teaches users how to design their own robots, while the retail version gives the user instant satisfaction.
God bless, Captain Vimes Is there a way we could organize, title, bullet, and class the information in this document better? It seems to meander, with little organization. Perhaps a bulleted list of the differences between the educational package and the retail package would be helpful as well. Moved the following information from Lego Mindstorms Where it was between comment tags: You can also use the wireless Bluetooth connection for uploading and downloading.
NXT Buttons Orange button: Used for moving left and right in the NXT menu Dark grey button: The four sensors are the "us" sensor ultrasonic which alows it to determin how far away an object is, touch sensor, sound sensor and light sensor.
It also controls up to three motors. When programming the block it has a lot of functions you can choose from. There are a lot of blocks:. Use this block to set your robot to go forwards or backwards, in a straight line or to turn by following a curve. Define how far your robot will go by using the Duration property. To record an action, choose a name and the length of time you want to record. Then download the block. Run your program and act out the motion you want to record.
Use this block to play a sound file or a single tone. To compose a melody of tones, arrange several sound blocks in a row. This block lets your robot sense its environment for a certain condition before it continues.
Use the slider or type in a number to set a trigger point so that the program continues when sensor values are below or above it. Use this block to repeat sequences of code. Set the condition that will end the loop: You can also set a loop to go on forever. Use this block to choose between two sequences of code. For example, when configured with a touch sensor, the switch block might run one series of blocks when the sensor is pressed and another when it is not.
Then select the connection number for the target NXT, input your message and data type, and choose a mailbox number where the message will be deposited. This block sends a logic signal true or false through a data wire indicating the current condition of a touch sensor.
This is a sound detector. Using data wires, it can send the current sound value and a logic signal true or false. This sensor detects ambient surrounding light. Through data wires it can send a logic signal true or false or the current light reading. By specifying a trigger point less than that by using the slider or by typing in a number , you can have your robot react if something gets too close to it. Output is sent by a data wire. This block counts the number of degrees one full rotation is degrees or full rotations that your motor turns.
It will send a logic signal true or false or the current value through a data wire. The reset button clears any value in the feedback box as well as in the NXT. When your program starts, the three built-in timers in the NXT will automatically start counting. I have the first edition of the excellent book, but the second improved version also has instructions for this color sensor.
Three colored LEDs are This little jumping robot jumps around on one foot with the help of a walking frame. To get a good idea of how it works, just have a look at the video, which is quite self-explanatory. If you have the Brick sorters are one of my favorite Mindstorms projects.
This design was made in early , and I shared the building instructions later that year. This was the first time I shared building instructions with the community, This is the first biped walker that I built with the NXT. Yet, it actually lifts its feet off the ground to walk. It walks by lifting up one foot, while turning the foot that is currently on the ground. This little dog was developed in November I assume they use Bluetooth for the communication between the phone and the NXT.
Posted by brickrobot on January 8, Lately I was playing around with different variations of steering mechanisms for my Lego Creations. The most current idea was to create a car like steering: Posted by brickrobot on January 5, This week I was shopping at our local Home Depot and stumbled upon these fancy laser distance measurers.
You point them somewhere and they tell you the distance. Why not trying this with NXT? Posted by brickrobot on January 4,